

现场将展示前沿的感知与推理软件,如何助力人形机器人在真实场景中实现安全自主导航。
旧金山 — 2026年3月16日— 随着人形机器人与各类机器人从新奇产物逐渐走进现实日常,感知技术的核心价值已不再局限于性能本身,更关乎安全。为机器人赋予视觉能力的相机、先进感知及推理软件,早已不只是实现导航或任务执行的工具;它们更是人形机器人的 “视觉皮层”,使其能够在人类环境中移动、工作和行动。
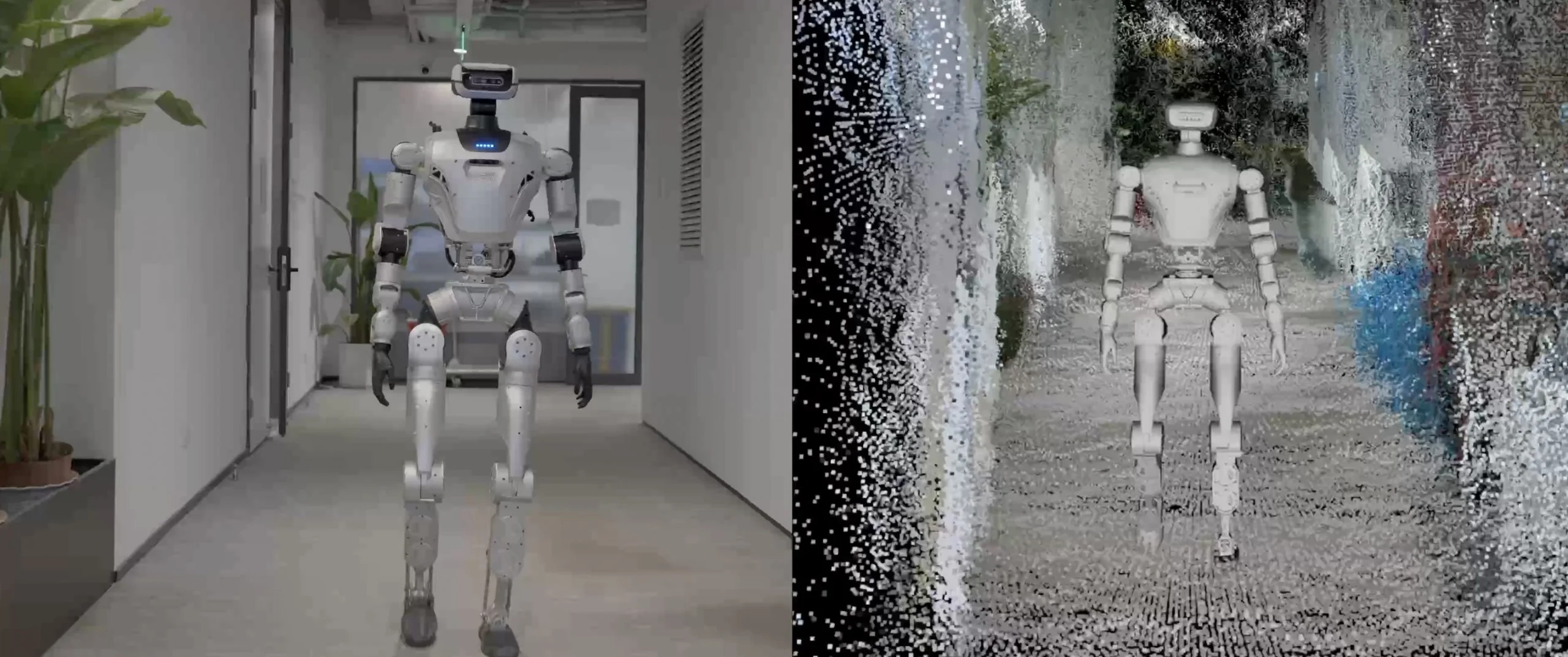
在 英伟达 GTC 大会 上, RealSense®正在展示一项业界首创的人形机器人自主导航演示,进一步夯实了自身作为以人为中心的场景中运行的智能机器的感知基石的地位。逐际动力逐际动力搭载 RealSense®深度相机与视觉SLAM (即时定位与地图构建) 技术,并集成了NVIDIA CuVSLAM 视觉里程计方案, 该演示将展示高密度3D深度感知技术如何赋能足式机器人,使其能够以自主、安全且可预测的方式进行定位、建图与导航。
这一精密的运动与导航栈的开发借助 NVIDIA Isaac Lab 得以加速, 该平台作为强化学习和策略训练的高保真数字试验场。这种 “仿真优先” 的方法帮助逐际动力跨越了 “从仿真到现实” 的鸿沟,使得其人形机器人在英伟达GTC大会实物亮相之前,就能掌握复杂的3D动作,并具备经过验证、可预测的安全性。
RealSense®将展示视觉AI如何作为负责任自主性的基石,让人形机器人更贴近实际的现实世界应用。
“人形机器人在三维空间中作业,与人类朝夕相伴,且所处的环境始终处于动态变化中。若想让机器人与人类安全协作,感知技术的责任远不止于硬件传感器本身。它必须成为机器人的视觉皮层,实现精确定位、碰撞避免、地形理解,以及在非结构化环境中稳定、可预测的运动。”
从实际应用角度而言,更安全的机器人技术意味着:
- 实现精准的定位与建图,让机器人始终掌握自身位置及周边环境状况
- 避免与人员及移动物体发生碰撞
- 通过对地形、边缘及高度变化的3D感知,实现防摔倒与稳定的运动能力
- 实现可预判、符合人类认知的运动模式,减少突发停机或无规则的动作修正
人形机器人实现真正自主导航的技术路径
轮式机器人在可预判的平面空间中移动,能在平坦地面实现高效快速的作业,扫地机器人便是一个典型的例子。而人形机器人与四足机器人的运动逻辑则复杂得多。它们在全 3D 空间中移动,这意味着接触点不断变化且运动轨迹呈非线性,因此对稳定的足部落点和敏锐的环境感知能力提出了极高要求。
轮式机器人所采用的纯编码器里程计与二维激光雷达技术,无法提供机器人稳定、安全运动所需的全3D环境感知能力。
迄今为止,这一技术鸿沟严重限制了足式机器人的落地应用,迫使许多腿足机器人不得不依赖远程操控、人工监督,或仅能在高度受控的环境中运行。
本次RealSense®与逐际动力在GTC大会上的联合演示,指明了一条通往未来的可行之路。RealSense®的密集深度感知与英伟达的视觉里程计、cuVSLAM技术深度融合,实现了场景理解、定位、建图与导航的全能力覆盖,使人形机器人得以在3D空间中安全作业。
同时,密集的3D感知技术还解锁了多项此前难以安全实现的机器人动作,包括楼梯导航、路缘与高度检测、复杂地形穿越,以及在人机共享空间中的动态避障。依托先进的路径规划技术,机器人还能自适应各类动态场景变化,例如应对移动的推车、移位的货盘,或突然进入其运动路径的行人。
逐际动力本次的技术演示,凸显了 RealSense®在更广泛机器人生态系统中不断扩大的作用。RealSense®深耕深度感知技术十年,打造了针对近中距感知优化的主动立体视觉技术,以及成熟的SDK生态体系,助力各大机器人研发团队更高效地完成原型开发与规模化落地,同时加速了人形机器人安全自主化技术的研发进程。
关于 RealSense®
RealSense®提供业界领先的深度相机和视觉技术,广泛应用于自主移动机器人、人形机器人、门禁系统、工业自动化、医疗等领域。其使命是为 Physical AI 提供世界级的感知系统,并将机器人与人工智能安全地融入日常生活。RealSense 致力于提供智能、安全、可靠的视觉系统,帮助机器在现实世界中进行导航与交互。公司总部位于美国加利福尼亚州库比蒂诺,并在全球范围内开展业务。了解更多信息请访问:www.realsenseai.com
媒体合作
Emily Roberts
PRforRealSense@bospar.com